使用说明
系统要求
| 项目 | 要求 |
|---|---|
| 操作系统 | Ubuntu 22.04 LTS(x86 或 arm 64) |
| 处理器(CPU) | 建议 ≥ 14 代 Intel Core i5,或 ≥ 13 代 Intel Core i7 同级性能(详见 设备性能要求) |
| 内存 | 建议 16 GB 及以上 |
| ROS 2 | Humble(需已安装于 /opt/ros/humble) |
| 网络工具 | curl(启动脚本健康检查用) |
| 浏览器 | Head 模式需现代浏览器(Chrome / Firefox / Edge 等) |
| 外设 | 外骨骼手套(USB 串口或有线/无线 UDP);可选灵巧手型号配置 |
说明:Python 3.10、FastAPI、数值库已内置在
bundle/目录,无需单独创建虚拟环境或编译源码。
设备性能要求(CPU)
本平台同时运行网关服务、ROS 2 多个子进程,Head 模式下还有 Web 三维可视化与实时曲线,对 CPU 算力 要求较高。低于推荐配置时,可能出现界面卡顿、关节曲线掉帧、子进程响应变慢等现象。
可参考如下建议:
| 等级 | CPU 参考 | 说明 |
|---|---|---|
| 推荐 | 14 代 Intel Core i5 或 13 代 Intel Core i7 及以上 | 可流畅运行 Head 模式(含 URDF 可视化与实时监控) |
| 勉强可用 | 13 代 i5、12 代 i7 或同级 | Headless 模式通常可接受;Head 模式可视化可能偶发卡顿 |
| 不推荐 | 低于上述等级的老款笔记本 / 低功耗 U 系列 | 易出现明显卡顿,不建议用于演示或生产 |
部署前准备
1. 安装 ROS 2 Humble
若目标机器尚未安装 ROS 2 Humble,请先按 ROS 2 Humble 官方文档 完成安装,并确认以下文件存在:
test -f /opt/ros/humble/setup.bash && echo "ROS Humble OK"
2. 使用有线外骨骼前的 USB 串口权限设置
方法一(推荐):
sudo chmod -R 777 /dev/ttyA*
sudo chmod -R 777 /dev/ttyU*
方法二:
-
将当前用户加入
dialout组,并重新登录后生效:sudo usermod -aG dialout "$USER" -
建议安装项目自带的 udev 规则,以便外骨骼 USB 拔插后权限自动恢复:
sudo cp configs/udev/99-io-exo-serial.rules /etc/udev/rules.d/sudo udevadm control --reload-rules && sudo udevadm trigger
3. 使用无线外骨骼前的网络配置准备
若使用无线外骨骼模块,需确保本机存在 10.42.0.* 网段地址。关于无线连接的详细步骤请查阅 无线连接 章节。
4. 解压与权限
cd /path/to/io_exotrans2hand_project_22.04_x86_v1.0.7
chmod +x scripts/*.sh
目录结构和运行模式
交付包目录结构和说明如下(以您实际收到的为准):
io_exotrans2hand_project_22.04_x86_vX.X.X/
├── scripts/
│ ├── run_gateway.sh # 主启动脚本(head / headless)
│ ├── install-desktop.sh # 安装桌面快捷方式
│ ├── bundle-env.sh # 加载 bundle 环境与 ROS
│ └── bundle-ws-setup.bash # ROS 工作空间 setup
├── configs/
│ ├── config/
│ │ ├── gateway.yaml # 网关主配置(端口、命令、数据流等)
│ │ └── topics.yaml # exo_tf 等 ROS 话题参数
│ ├── end_tools/ # 灵巧手型号配置(可上传扩展)
│ ├── exoskeleton_urdf/ # 外骨骼 URDF 与网格
│ ├── udev/ # USB 串口 udev 规则
│ └── IO.png # 应用图标
├── src/
│ ├── io_gateway/ # 网关服务(Web / API / 编排)
│ └── io_unicontroller/ # 灵巧手控制器脚本
├── bundle/ # 预编译运行时(Python、ROS 包、依赖库)
├── logs/ # 运行日志(按日期分目录,启动后自动创建)
└── io-gateway.desktop # 桌面快捷方式模板
本交付包提供两种运行模式:
| 模式 | 适用场景 | Web 界面 | 操作方法 |
|---|---|---|---|
| Head(默认) | 本地桌面、调试、演示 | 有,自动打开浏览器(界面说明请查阅 Web 界面) | 方法一:进入项目包,开启终端手动安装 ./scripts/install-desktop.sh 后,双击桌面快捷方式或在应用菜单搜索「IO Gateway」/「IO Gesture」启动;方法二:进入项目包,在终端运行 ./scripts/run_gateway.sh |
| Headless | SSH 远程、systemd 服务、二次集成 | 无 | 进入项目包,在终端运行 ./scripts/run_gateway.sh --headless |
详细启动方式请查阅 启动方式 章节。
启动方式
所有启动方式均通过 scripts/run_gateway.sh,它会自动加载 bundle/ 内 Python 与 ROS 环境。
Head 模式(推荐)
./scripts/run_gateway.sh
-
默认访问地址:http://127.0.0.1:8080/
-
可选:
-
不自动打开浏览器(仍提供 Web UI):
GATEWAY_NO_BROWSER=1 ./scripts/run_gateway.sh# 或./scripts/run_gateway.sh --no-browser -
桌面快捷方式:
./scripts/install-desktop.sh安装后可在桌面或应用菜单搜索「IO Gateway」/「IO Gesture」启动。
-
Headless 模式
./scripts/run_gateway.sh --headless
-
启动后终端会提示:
[run_gateway] mode=headless API=http://127.0.0.1:8080/api/v1 WS=ws://127.0.0.1:8080/ws -
访问根路径
http://127.0.0.1:8080/将返回 JSON 指引,而非 HTML 页面。 -
Headless 快速验证:
# 健康检查curl -s http://127.0.0.1:8080/api/v1/status | python3 -m json.tool# 选手型(示例)curl -s -X POST http://127.0.0.1:8080/api/v1/hands/select \-H "Content-Type: application/json" \-d '{"hands": ["YourHandModel"]}'
Headless 与 Head 共用同一套后端;差异仅为不提供 HTML 控制台与静态资源。
Web 界面
界面总览
前端 Web 界面从上到下依次为:
- 外骨骼和灵巧手配置模块。
- 外骨骼和灵巧手可视化模块。
- 系统监控模块。
外骨骼和灵巧手配置模块
外骨骼和灵巧手可视化模块
系统监控模块
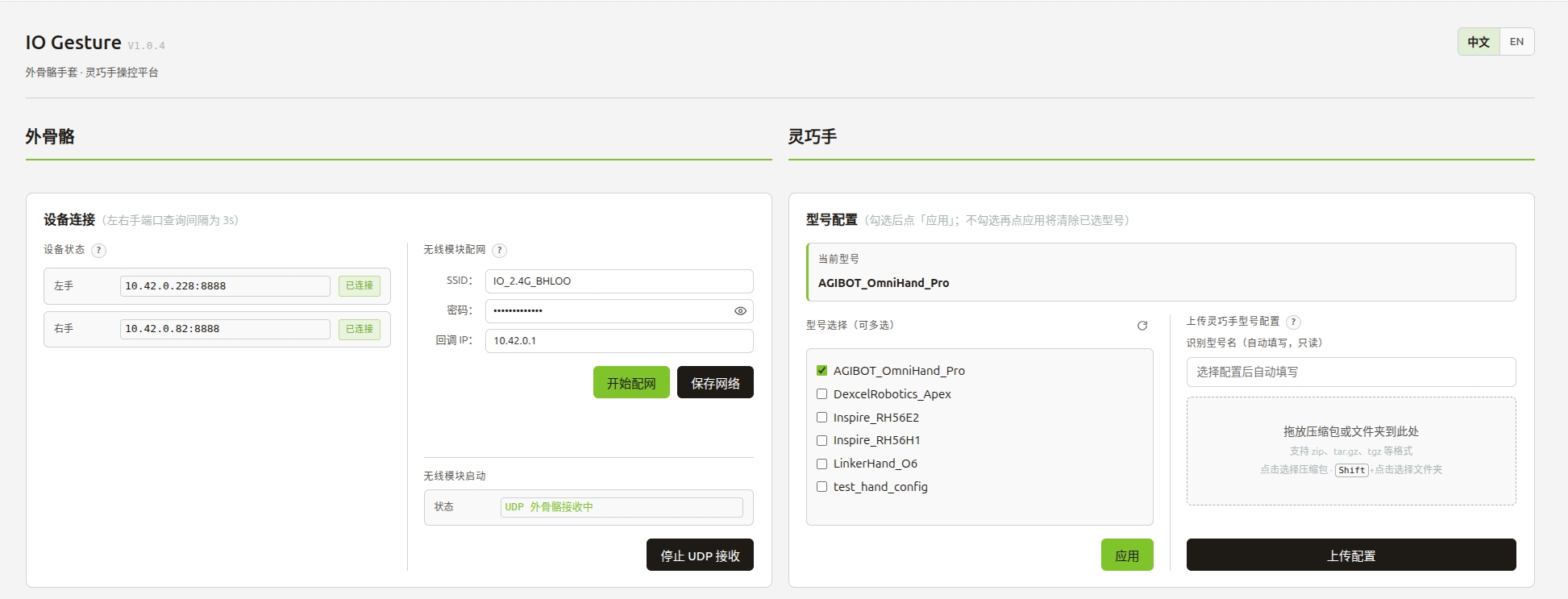
外骨骼和灵巧手配置模块
外骨骼连接与配置
有线连接
- 将外骨骼手套通过随附的 USB C-A 转接线连接至电脑 USB 端口,软件会自动识别左右手的连接状态(刷新约耗时3秒)。
- 连接成功后,设备状态会显示为已连接,同时会显示端口信息。
无线连接
- 将随附的路由器接入电源启动。
- 将电脑连接至�路由器 Wi-Fi(此步骤也可以通过网线连接电脑与路由器)。
- 将电脑的
IPv4地址设置为10.42.0.2。 - 将外骨骼手套与无线模块连接。

- 开启无线模块:"短按 + 长按"设备按钮,看到电量灯闪烁时马上松开,此时设备开机,等待无线模块指示灯变为绿色闪烁状态。
- 在 Web 界面点击 「启动 UDP 接收」按钮,等待完成。
- 连接成功后,设备状态会显示为已连接,同时会显示端口信息。
附:无线模块的配网流程
无线模块在出厂时已完成配网流程,此说明仅供需要再次配网时参考,如无需要可跳过。
两个无线模块需要分别单独进行配网,即按下述流程先完成其中一个无线模块的配网,将其关机后,再进行另一个无线模块的配网。两个无线模块均完成配网后,即可开机使用。
- 开启无线模块:
- "短按 + 长按"设备按钮,看到电量灯闪烁时马上松开,此时设备开机。
- 将无线模块切换到配对模式:
- 步骤一:开机状态下:短按一下 → 长按 3 秒(电量灯闪烁一次)→ 继续长按至 10 秒(蓝灯亮起)→ 松开 → 设备关机;
- 步骤二:重新开机:短按一下 → 长按 3 秒(电量灯闪烁一次)→ 松开 → 进入配对模式(蓝灯亮起)。
- 进行 ESP 配网:
- 将随附的路由器接入电源启动,与您希望运行 IO Gesture 程序的电脑连接(为了确保配网成功,配网时请确保电脑只与此路由器保持连接):
- 将电脑通过网线连接至路由器;
- 或者将电脑连接至路由器 Wi-Fi 的 2.4G 网段(例如:
IO_2.4G_*****)。
- 输入路由器 Wi-Fi 的 SSID(名称)、密码和回调 IP (
10.42.0.1)。 - 需确认除上述电脑外,还有其他设备已连接至路由器。
- 点击「开始配网」,软件会自动校验回调 IP(点击「保存配置」可以将当前网络配置信息保存至本地配置文件);
- 查看无线模块指示灯的状态,应由蓝色常亮短暂变红,然后变为绿色常亮(如果连接了外骨骼手套则为绿色闪烁)。
- 将随附的路由器接入电源启动,与您希望运行 IO Gesture 程序的电脑连接(为了确保配网成功,配网时请确保电脑只与此路由器保持连接):
附:无线模块设备按钮使用方法
| 功能 | 操作方法 |
|---|---|
| 开机 | 短按一下 → 长按 3 秒(电量灯闪烁一次)→ 松开 |
| 关机 | 短按一下 → 长按 3 秒(电量灯闪烁一次)→ 松开 |
| 关机状态下查询电量 | 短按一下 |
| 进入配对模式 | 1. 开机状态下:短按一下 → 长按 3 秒(电量灯闪烁一次)→ 继续长按至 10 秒(蓝灯亮起)→ 松开 → 设备关机 2. 重新开机:短按一下 → 长按 3 秒(电量灯闪烁一次)→ 松开 → 进入配对模式(蓝灯亮起) |
附:无线模块设备指示灯说明
| 状态 | 指示灯 |
|---|---|
| 无 Wi-Fi 连接 | 红色常亮 |
| 监听模式 / 配对模式 | 蓝色常亮 |
| Wi-Fi 已连接、无设备数据传输 | 绿色常亮 |
| Wi-Fi 已连接、有设备数据传输 | 绿色闪烁 |
| 读取内参 | 蓝色闪烁 |
| 发现设备 | 蓝绿色闪烁 |
灵巧手连接与配置
- 将灵巧手与电脑连接,并进行必要的部署适配。
- 上传灵巧手型号配置文件:
- 可拖放压缩包(zip/tar.gz/tgz 等)/文件夹上传。
- 或者点击「上传配置」,在文件浏览器中选择。
- 选择目标灵巧手型号:如未找到所需型号可点击「刷新型号列表」。
- 点击「应用型号」应用选择。
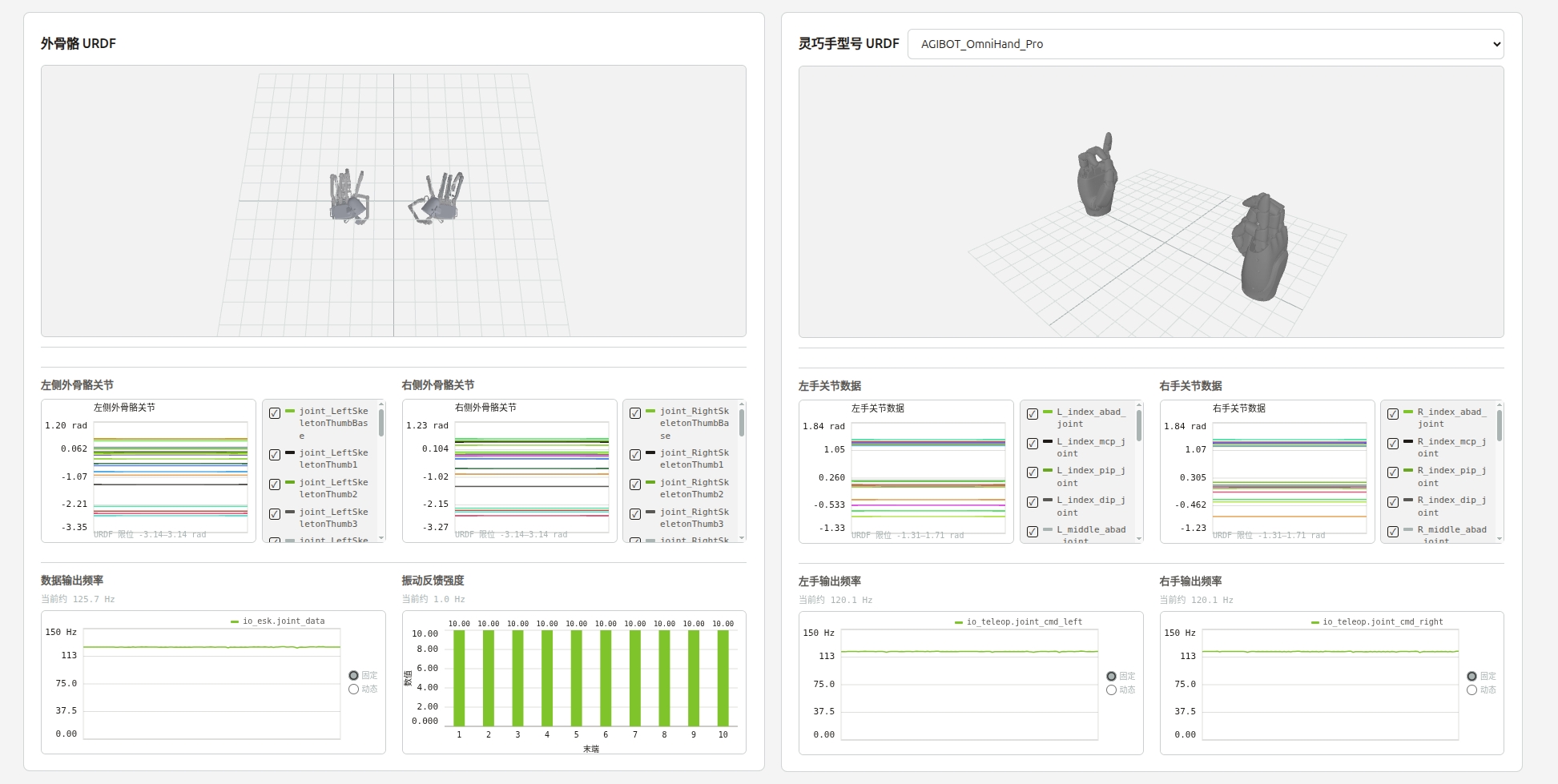
外骨骼和灵巧手可视化模块
外骨骼运动实时可视化
- 可使用鼠标指针拖动旋转图像,使用鼠标滚轮缩放。
左/右侧外骨骼关节数据
- 显示左/右侧外骨骼关节数据
exo_joint的数值随时间的变化趋势。 - 可勾选需要显示的数据。
数据输出频率
- 显示数据源
exo_joint的输出频率随时间的变化趋势。 - 数据输出频率图像可设置固定/动态轴。
振动反馈
- 显示灵巧手发送给外骨骼的振动反馈强度
exo_vibration数值。 - 末端 1~10 对应外骨骼的 10 根手指末端。
灵巧手可视化
灵巧手运动实时可视化
- 可使用鼠标指针拖动旋转图像,使用鼠标滚轮缩放。
左/右手关节数据
- 显示左/右侧外骨骼关节数据
cmd_left/cmd_right的数值随时间的变化趋势。 - 可勾选需要显示的数据。
左/右手输出频率
- 显示数据源
cmd_left/cmd_right的输出频率随时间的变化趋势。 - 数据输出频率图像可设置「固定」/「动态轴」。
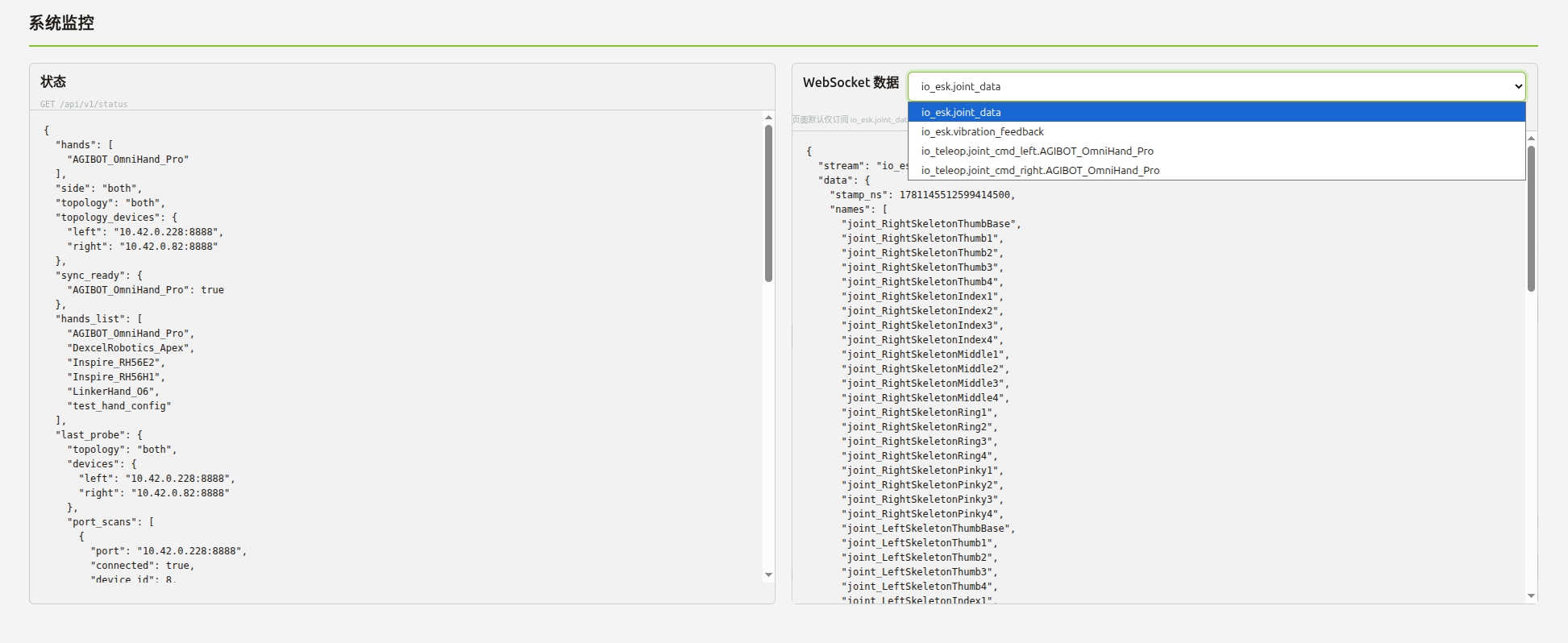
系统监控模块
状态
- 实时显示
/status接口数据,包括运行时状态:拓扑、灵巧手型号、侧别、子进程、ROS 桥、sync 状态。
WebSocket 数据
- 实时显示外骨骼手套
exo_joint和已应用的灵巧手cmd_left/cmd_right的数值。 - 可点击下拉框选择。
常用环境变量
| 变量 | 说明 | 默认值 |
|---|---|---|
GATEWAY_PORT | 监听端口 | 读 gateway.yaml 中 listen_port(8080) |
GATEWAY_NO_BROWSER | Head 模式下禁止自动打开浏览器 | 未设置 |
IO_EXOTRANS2HAND_ROOT | 项目根目录 | 脚本所在目录的上级 |
示例:指定端口 9000 并以 headless 运行:
GATEWAY_PORT=9000 ./scripts/run_gateway.sh --headless
日志与排障
| 类型 | 路径 |
|---|---|
| 网关主进程 | logs/YYYY-MM-DD/io_gateway.log |
| 子进程 | logs/YYYY-MM-DD/ 下各组件独立日志 |
常见问题:
-
启动失败 / 找不到 Python
确认bundle/opt/python/bin/python3存在且可执行;勿删除bundle/目录。 -
ROS 相关报错
确认/opt/ros/humble/setup.bash存在;在终端手动source /opt/ros/humble/setup.bash后重试。 -
检测不到 USB 外骨骼
检查用户是否在dialout组;是否安装 udev 规则;设备是否被其他进程占用。 -
Head 模式浏览器未自动打开
手动访问http://127.0.0.1:8080/;或使用GATEWAY_NO_BROWSER=1后自行打开。 -
无线 UDP 无法启动
确认本机10.42.0.*网段地址已配置。 -
无可用灵巧手型号
通过 Web 控制台上传配置包,或将合法手型目录放入configs/end_tools/<型号名>/。 -
界面卡顿 / 可视化掉帧 / 整体响应慢
多为 CPU 性能不足。请查阅 设备性能要求。可改用./scripts/run_gateway.sh --headless减轻负载,或关闭浏览器中不必要的标签页与其他占 CPU 的程序。
如遇其他问题,请联系技术支持并提供以下信息:
- 操作系统版本与硬件连接方式(USB / UDP)
- 启动命令(head 或 headless)及完整终端输出
logs/下当日io_gateway.log及相关子进程日志